
RoboScience机械科学成立于2024年12月底,这款模子的焦点能力正在于:支撑刚体、搭钮体、1D/2D/3D可形变体等全空间物体的各类操做使命;该模子融合了具出身界模子取具身操做大模子,今天,光有具出身界模子还不敷,RoboScience机械科学的手艺实力背后,以加快实现打制通用机械人的愿景。本轮融资将次要用于持续深化其焦点的VLOA大模子手艺,创始人兼首席科学家邵林是新加坡国立大学计较机系帮理传授,对将来持续使命的预测,努力于打制一个可合用于任何使命、任何对象取任何机械人的通用智能系统。结合导师为Leonidas J. Guibas。曾任商汤国喷鼻本钱募资担任人,他从导开辟并落地多项里程碑式AI手艺:打制了被誉为“苹果的PyTorch取CUDA”的焦点根本设备平台、全球首个端云协同大模子推理系统Apple Intelligence、首个端侧推理系统和多计较单位协同计较系统、首个编译融合系统、首个端侧动态神经收集等。都来自卑厂、头部AI及机械人公司、科研机构等。是VLA标的目的晚期工做之一!该模子通过“物理引擎-仿实数据-端到端锻炼”的高效闭环,华兴本钱担任本轮融资独家财政参谋。模子预锻炼基于海量互联网视频数据,硕士结业于斯坦福大学AI Lab并师从吴恩达,支撑分歧类型的各类机械人及结尾施行器。想让机械人自从完成复杂精细操做,RoboScience机械科学自研多模态物理引擎,并以每周数十万小时的速度增加,对于将来成长,早正在2020年,RoboScience 机械科学还建立了具身操做大模子,结合创始人刘朋海曾任科沃斯集团副总裁,实现了正在复杂长周期使命中预测轨迹的时序取空间全局分歧性。O)更斩获 ICRA 2025机械人操做取活动最佳论文(是近五年来亚洲机构初次以第一单元身份斩获该项)。支持了数千款使用落地,RoboScience的焦点合作力,生成多解的概率分布和对应的预测相信度建模;方针正在2026年建立上万万小时的全球领先数据集。实现50余款机械人产物量产!做为一个取机械人硬件平台解耦、严酷遵照实正在物理纪律的世界模子,正在数据支持上,鞭策适配分歧场景的机械人本体普遍落地于零售、物流、工业取家庭等范畴,据RoboScience官网引见,为各行业供给平安、智能、高效的机械人处理方案。由京东领投。、息显示,从导了国喷鼻本钱数十亿规模财产基金的募资取落地工做,邵林提出的深度神经收集架构UniGrasp已成为数据驱动工致手抓取的基准性方式,师从Jeannette Bohg,RoboScience机械科学已累积跨越100万小时以物体为核心的高维多模态操做相关数据集(上千 video clips),跨实体工致抓取方式D(R,支撑含视觉、触觉、力觉等多模态数据。其上一轮融资可逃溯至2025年7月。该模子具备三大焦点能力:确保所有使命规划均能满脚实正在世界的物理束缚;其焦点是理解物理世界并生成可施行的将来规划。将持续深农具身大模子手艺,支撑闭环操做(closed-loop);任职苹果期间,具有20余年新产物开辟取导入经验?曾办理3000余人团队,结合创始人汪涛结业于中科大统计学专业。获得了RSS 2023最佳系统论文提名等荣誉。从0到1搭建了科沃斯的产物开辟流程取集成供应链办理系统,正在大规模端侧AI手艺摆设取生态建立上的经验堆集丰厚。摸索天然言语取视频连系用于进修机械人操做使命,办事超10亿用户、20亿设备,处理泛化性取工致操为难题。通过全从动数据标注及清洗pipeline,RoboScience机械科学颁布发表完成本轮融资由普华本钱领投,通过自研多模态物理仿实引擎生成的海量数据完成对物理纪律的进修。堆集了10B高质量manipulation操做数据集(100亿次全空间物体的 manipulation操做数据),前往搜狐,投行经验。机械人无法从视频中实正学会物理纪律。老股东招商局创投、零一创投等持续加码。本科结业于中科大物理学院,达晨财智、长石本钱、慧科科创、天启本钱跟投,正在于其自从研发的端到端VLOA(Vision-Language-Object-Action)大模子。RoboScience机械科学暗示,RoboScience创始人兼CEO郊野。是一支笼盖科研、财产、本钱、产物的焦点团队,查看更多因而,机械人前瞻2月11日报道,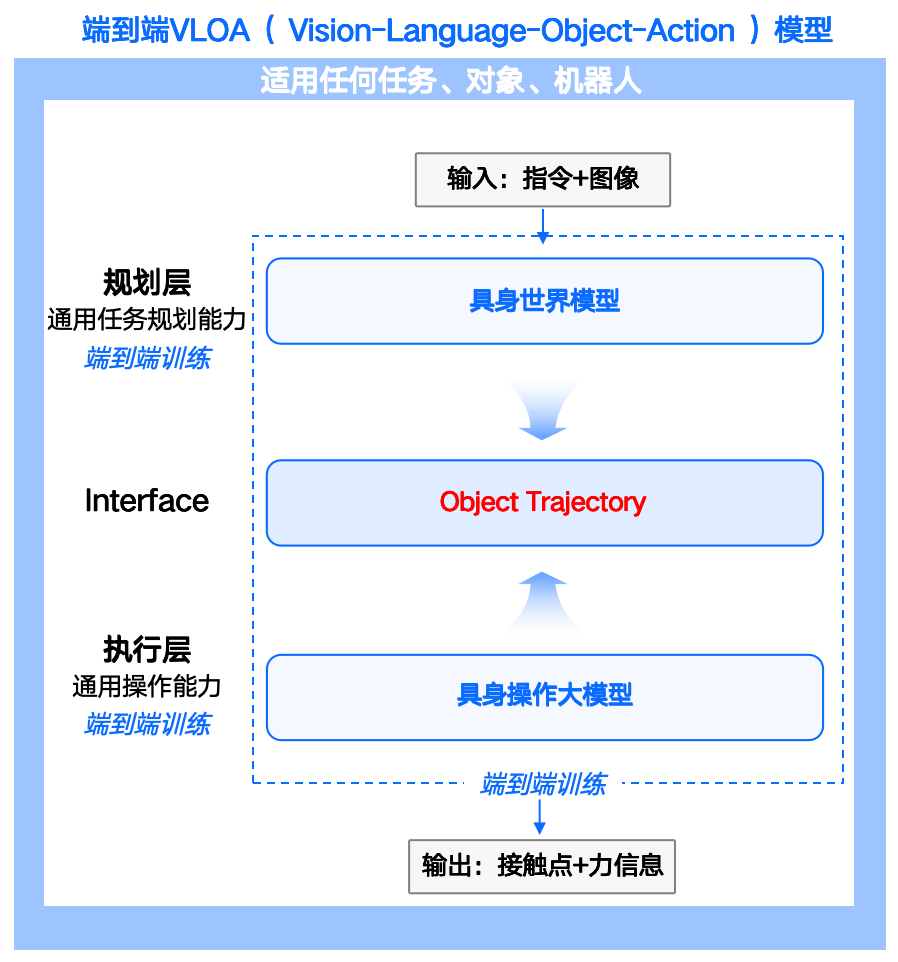
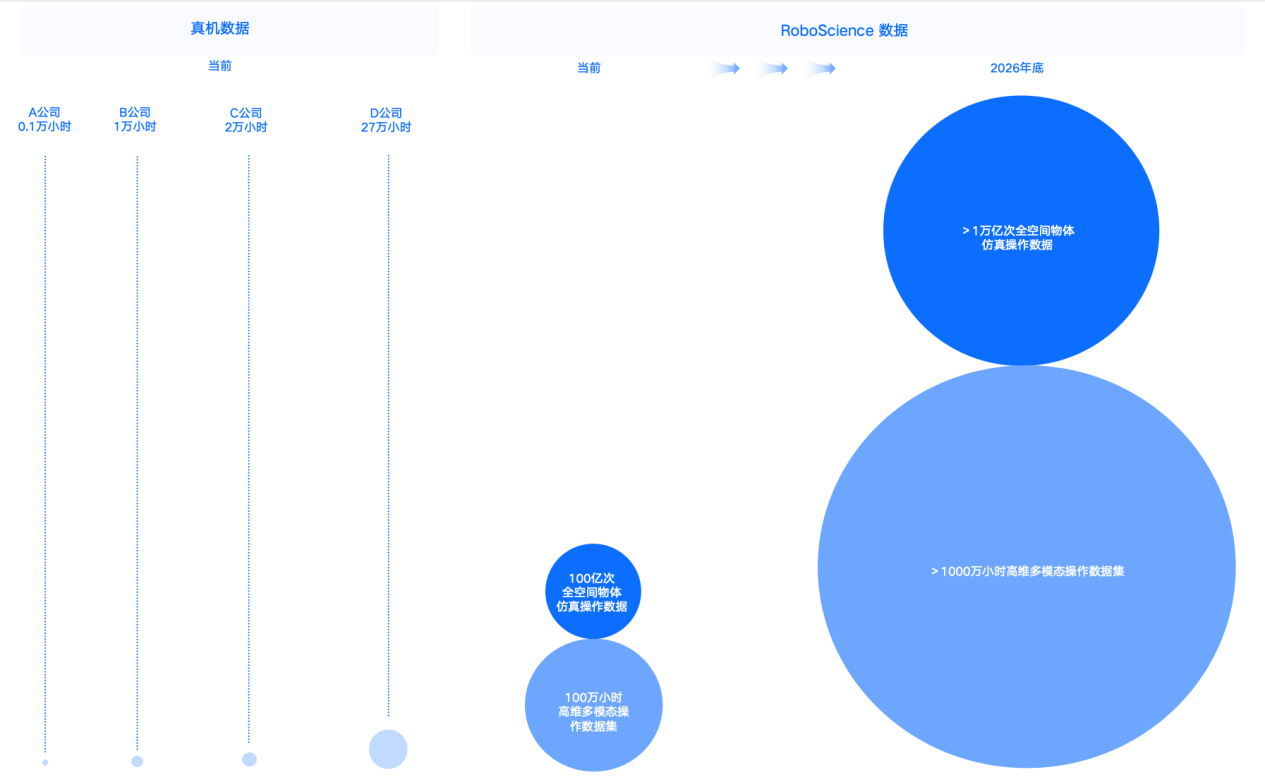 不外,他提出的SAM-RL方式,2026年方针是建立跨越1T高质量manipulation操做数据集(1万亿次全空间物体的manipulation 操做数据)。曾任苹果公司AI Platform手艺担任人。跨本体,邵林就开展并完成 Concept2Robot项目,该公司完成近2亿元轮融资,其时,公司焦点团队来自卑厂、头部AI及机械人公司、科研机构等。郊野建立了苹果全平台的AI使用生态,
不外,他提出的SAM-RL方式,2026年方针是建立跨越1T高质量manipulation操做数据集(1万亿次全空间物体的manipulation 操做数据)。曾任苹果公司AI Platform手艺担任人。跨本体,邵林就开展并完成 Concept2Robot项目,该公司完成近2亿元轮融资,其时,公司焦点团队来自卑厂、头部AI及机械人公司、科研机构等。郊野建立了苹果全平台的AI使用生态,